
{kind=link}
3600
Câu 1: Hệ thống tuyến tính được mô tả bởi phương trình trạng thái cấp 2: Với giá trị nào của k thì hệ thống điều khiển được hoàn toàn?$\left\{ \begin{array}{l}\dot x = \left[ {\begin{array}{*{20}{c}}1&2\\{ - 1}&k\end{array}} \right].x + \left[ \begin{array}{l}1\\ - 1\end{array} \right]\\y = {\rm{[}}1\,\,\,0{\rm{]}}{\rm{.}}x\end{array} \right..u$
Correct!
Wrong!
Câu 2: Khâu tích phân lý tưởng có hàm truyền G(s) =1/s:
Correct!
Wrong!
Câu 3: Đặc tính biên độ tần số của hệ thống được xác định bởi công thức nào dưới đây với P(ω), Q(ω) lần lượt là phần thực và phần ảo của hàm truyền tần số của hệ đó:
Correct!
Wrong!
Câu 4: Đặc tính pha tần số của hệ thống được xác định bởi công thức nào dưới đây với P(ω), Q(ω) lần lượt là phần thực và phần ảo của hàm truyền tần số của hệ đó:
Correct!
Wrong!
Câu 5: Bộ bù trễ pha làm cho hệ thống:
Correct!
Wrong!
Câu 6: Trong khâu quán tính bậc nhất đặc tính tần số biên – pha của phần tử được biểu diễn qua công thức: [R(ω)-k/2]2 + I2(ω) = (k/2)2 đồ thị của nó là?
Correct!
Wrong!
Câu 7: Các khâu động học cơ bản là các phần tử của hệ thống điều chỉnh tự động, chúng có các tính chất như sau?
Correct!
Wrong!
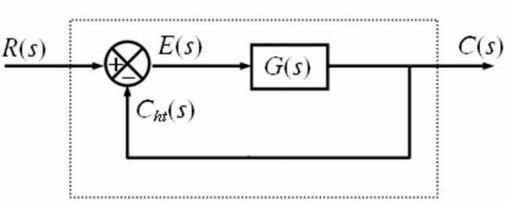
Câu 8: Biểu thức sai số xác lập cho hệ thống sau:
Correct!
Wrong!
Câu 9: Các khâu động học cơ bản bao gồm?
Correct!
Wrong!
Câu 10: Tần số cắt pha ω-πlà tần số tại đó pha của đặc tính tần số:
Correct!
Wrong!
Câu 11: Nếu hàm quá độ của khâu khuếch đại h(t) = k.1(t) thì hàm trọng lượng k(t) bằng bao nhiêu?
Correct!
Wrong!
Câu 12: Trong khâu quán tính bậc nhất, đặc tính pha tần số có giá trị?
Correct!
Wrong!
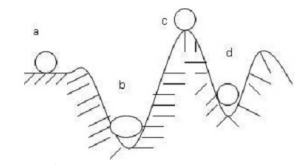
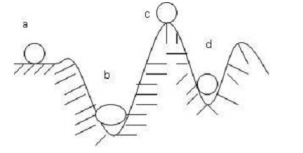
Câu 13: Cho biết vị trí cân bằng ở biên giới ổn định trong hình sau:
Correct!
Wrong!
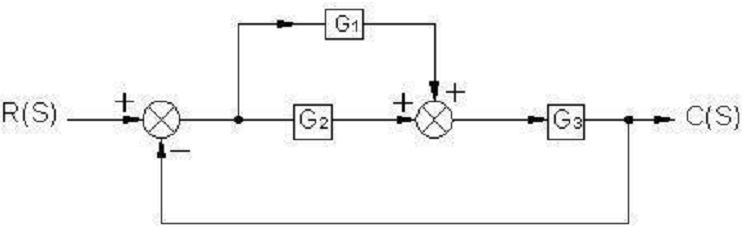
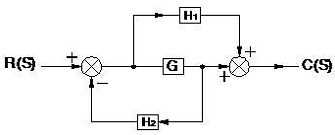
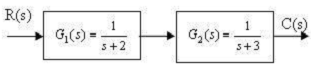
Câu 14: Phương trình đặc tính của hệ thống như hình vẽ là?
Correct!
Wrong!
Câu 15: Phương trình đặc tính của hệ thống như hình vẽ là?
Correct!
Wrong!
Câu 16: Phương trình đặc tính của hệ thống như hình vẽ là?
Correct!
Wrong!
Câu 17: Phương trình đặc tính của hệ thống như hình vẽ là?
Correct!
Wrong!
Câu 18: Khâu tỉ lệ có hàm truyền G(s)=K
Correct!
Wrong!
Câu 19: Hệ thống rời rạc được mô tả bằng phương trình sai phân: c(k+4) + 4c(k+3) + 2c(k+2) + c(k+1) + 5c(k) = r(k+1) + 5r(k) , b ậc của hệ thống là:
Correct!
Wrong!
Câu 20: Đối với bài toán phân tích hệ thống thì vấn đề đặt ra là:
Correct!
Wrong!
Câu 21: Hệ phi tuyến có thể ổn định trong:
Correct!
Wrong!
Câu 22: Các phương pháp khảo sát tính ổn định của hệ thống liên tục gồm:
Correct!
Wrong!
Câu 23: Hệ phi tuyến không ổn định trong:
Correct!
Wrong!
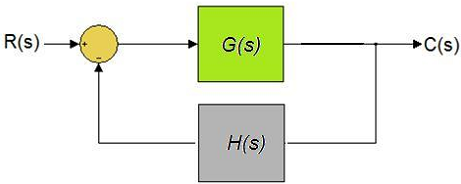
Câu 24: Hàm truyền vòng kín của hệ thống hồi tiếp âm là:
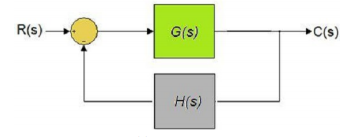
Correct!
Wrong!
Câu 25: Cho biết có mấy vị trí cân bằng ổn định trong hình sau:
Correct!
Wrong!
Thi thử trắc nghiệm môn Lý thuyết điều khiển tự động online - Đề #6
Hãy truy cập vào Tracnghiem123 ngay hôm nay để làm bài thi thử trắc nghiệm môn Lý thuyết điều khiển tự động online – Đề #6 một cách dễ dàng và nhanh chóng. Đề thi được thiết kế đặc biệt cho những ai đam mê và muốn nâng cao kiến thức về lĩnh vực này. Đừng bỏ lỡ cơ hội trải nghiệm và kiểm tra kiến thức của mình ngay hôm nay!