
{kind=link}
3600
Câu 1: Hệ thống bất biến theo thời gian là hệ thống có:
Correct!
Wrong!
Câu 2: Tìm nghiệm của hệ thống có phương trình đặc tính sau: s2+ 4s + 3 = 0
Correct!
Wrong!
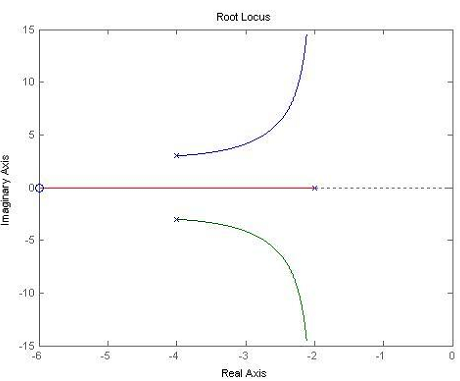
Câu 3: Hệ thống có quỹ đạo nghiệm số như hình vẽ. Số nghiệm cực của hệ thống là:
Correct!
Wrong!
Câu 4: Biểu đồ Bode biên độ của khâu tích phân lý tưởng G
Correct!
Wrong!
Câu 5: Hệ SISO là hệ thống có:
Correct!
Wrong!
Câu 6: Số lần đổi dấu của số hạng ở cột 1 bảng Routh bằng số nghiệm:
Correct!
Wrong!
Câu 7: Hàm truyền đạt của hệ thống nối tiếp:
Correct!
Wrong!
Câu 8: DAC là:
Correct!
Wrong!
Câu 9: Hàm truyền của hệ thống:
Correct!
Wrong!
Câu 10: Hệ thống rời rạc là ổn định nếu tất cả các nghiệm của phương trình đặc tính:
Correct!
Wrong!
Câu 11: Hàm truyền đạt
Correct!
Wrong!
Câu 12: Đặc điểm của khâu hiệu chỉnh PD
Correct!
Wrong!
Câu 13: Tiêu chuẩn IAE
Correct!
Wrong!
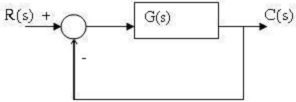
Câu 14: Cho hệ thống hồi tiếp âm đơn vị sau. Sai số xác lập exl là:
Correct!
Wrong!
Câu 15: Cho hệ thống hồi tiếp âm đơn vị sau. Sai số xác lập exl là:
Correct!
Wrong!
Câu 16: Xác định hàm truyền tương đương của hệ thống nối tiếp như hình vẽ:
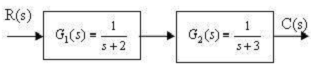
Correct!
Wrong!
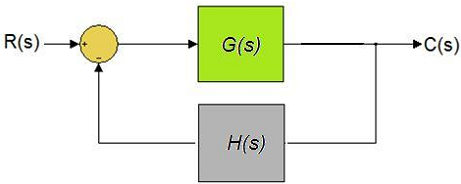
Câu 17: Hàm truyền tương đương của hệ thống hồi tiếp như hình vẽ là:
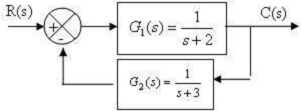
Correct!
Wrong!
Câu 18: Cho hệ thống có cấu trúc sau: Tìm hàm truyền tương đương của hệ thống:
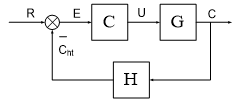
Correct!
Wrong!
Câu 19: Cho hệ thống có hàm truyền tương đương sau:
Correct!
Wrong!
Câu 20: Cho hệ thống có hàm truyền tương đương sau:
Correct!
Wrong!
Câu 21: Cho hệ thống có hàm truyền tương đương sau:
Correct!
Wrong!
Câu 22: Cho hệ thống có hàm truyền tương đương sau:
Correct!
Wrong!
Câu 23: Cho hệ thống có hàm truyền tương đương sau: Xét tính ổn định của hệ thống trên:
Correct!
Wrong!
Câu 24: Cho hàm truyền
Correct!
Wrong!
Câu 25: Cho hàm truyền
Correct!
Wrong!
Thi thử trắc nghiệm môn Lý thuyết điều khiển tự động online - Đề #2
Thi thử trắc nghiệm môn Lý thuyết điều khiển tự động online – Đề #2 nhanh tại ‘Lý thuyết điều khiển tự động’ chỉ có tại Tracnghiem123. Đảm bảo nhanh chóng và dễ dàng, hãy chuẩn bị tinh thần và thử sức ngay!